Jiayun (Peter) Wang
Postdoc, California Institute of Technology | peterw at caltech dot edu

I am a postdoctoral researcher in the Computing + Mathematical Sciences Department at the California Institute of Technology, working with Anima Anandkumar. Prior to joining Caltech, I completed my Ph.D. in Vision Science and Berkeley AI Research (BAIR) at UC Berkeley, where I worked with Stella Yu on machine learning and computer vision methods.
Research Interest: My research lies at the intersection of machine learning, computer vision and AI for healthcare. My research highlights:
- Minimally Supervised ML. Self-supervised learning from unlabeled data for recognition & detection (TPAMI’21) and for geometry (ECCV’24).
- Efficient AI Algorithms. AI models as a duality to the data. Models can be made efficient if they are aware of data structures, such as orthogonality (CVPR’20) and recurrence (WACV’23).
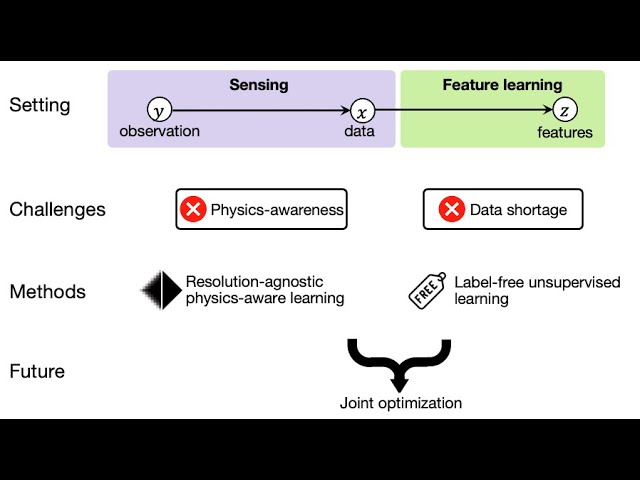
- Inverse problems. I develop any-resolution neural operators for inverse problems and computational imaging, e.g. MRI (CVPR’25), 3D photoacoustic tomography and ultrasound (arXiv’25).
- AI for Healthcare. Minimally supervised ML for enhanced clinical effectiveness, e.g. multi-modal diagnosis (MICCAI’24) and interpretable diagnosis (Sci. Rep.’22).
Research Overview Video (Feb 2025)
news
| May 29, 2025 | Let’s chat at CVPR! I’ll give two talks (6/12 10am at Practical/Theoretical Gap and 11:30am at Embodied AI) and present our poster (6/15 morning). |
|---|---|
| Feb 27, 2025 | Unified Model for MRI is accepted to CVPR 2025! |
| Feb 10, 2025 | Congrats to my mentee Arushi for the CS PhD offer from Stanford! |
| Feb 09, 2025 | Congrats to my mentee Aditi for the CS PhD offers from NYU and Princeton! |
| Dec 02, 2024 | SSL for Surgery won the best paper at ML4H 2024! 🏆 |



